Reconfigurable Walking Robot for NASA’s BIG Idea Challenge
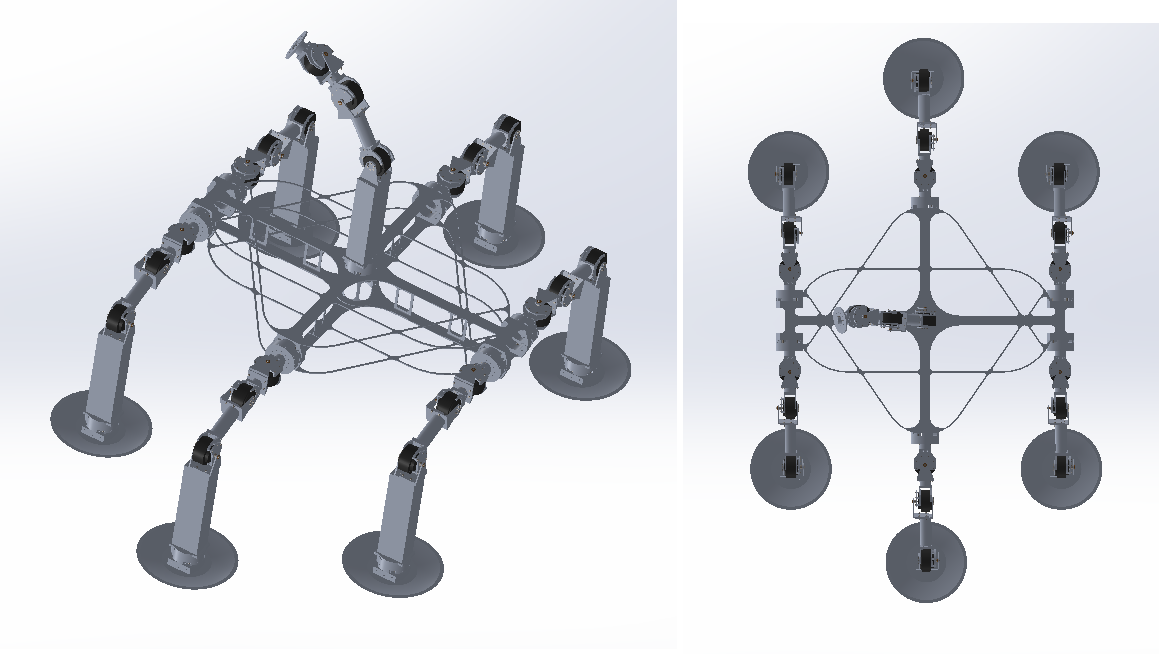
The WORMS (Walking, Oligomeric, Robotic Mobility System) project is a NASA 2022 BIG Idea Challenge finalist project. I am currently developing software infrastructure and code to implement a novel walking gait of a hexapod robot to ensure smooth traversal of different terrain using Python and ROS2. I will be creating simulations of robot configuration and carrying out biweekly integrated tests to debug and iterate. As a part of a 20 person team working on this project, I am collaborating with others to break up tasks and am working across different sub-teams, such as mechanical, electrical, and accessories.
Summer Research Program at the EPFL Biorobotics Laboratory
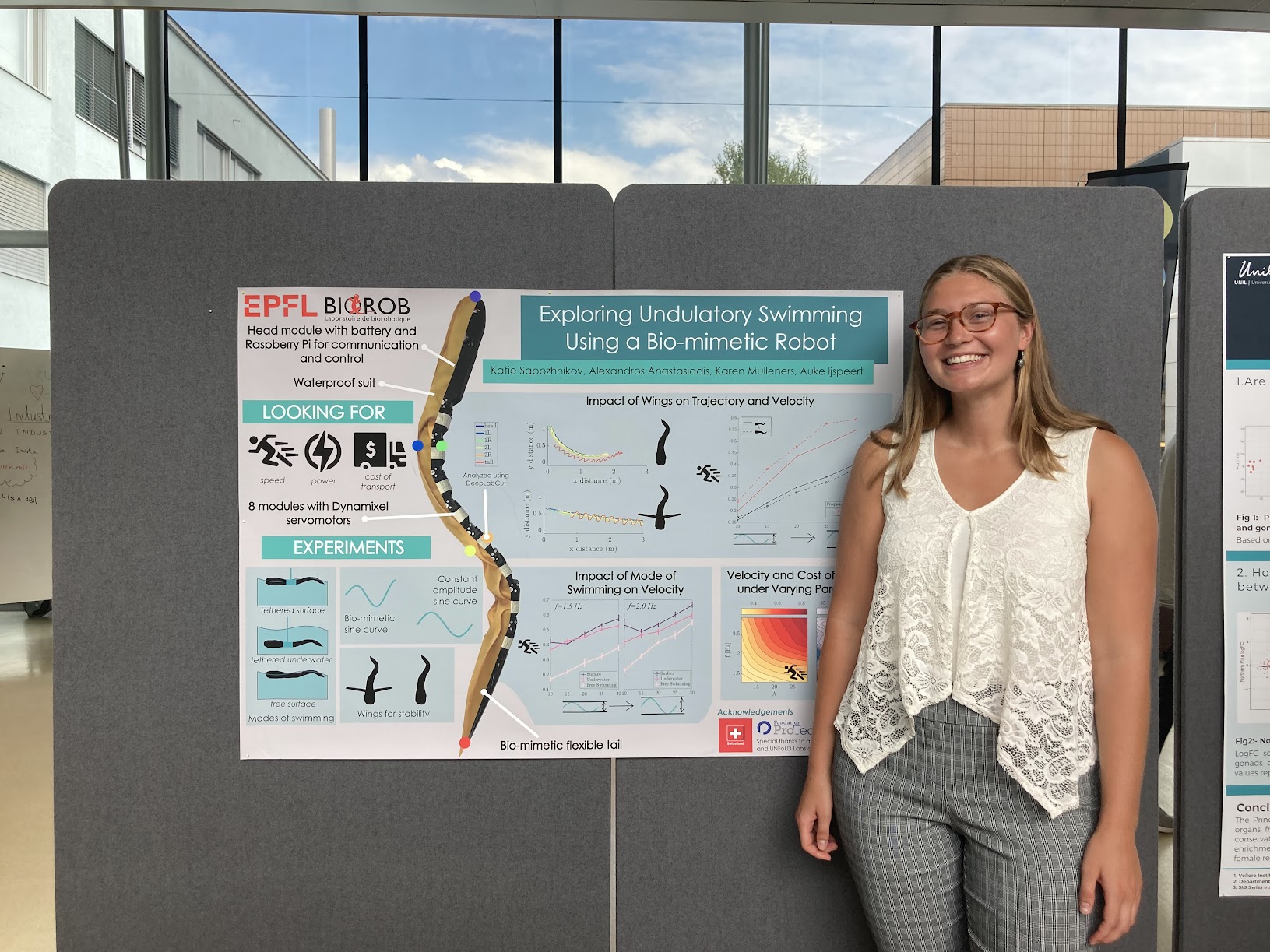 I spent 8 weeks at the EPFL Biorobotics and UNFoLD (Unsteady Flow Diagnostics) Laboratories in Lausanne, Switzerland
studying undulatory swimming using a bio-mimetic eel-like robot.
My work centered around carrying out experiments to find the optimal parameters for
speed, power, and cost of transport.
I designed and fabricated attachments to the robot to increase the stability and
reduce rolling motion and offset trajectory of the robot.
I analyzed video footage using the DeepLabCut framework
and Python to track the robot to
extract the trajectory and velocity.
As a part of my work in UNFoLD,
I designed an optical tracking system to track a moving device in an
experimental water tank to allow for more extensive experiments.
As a part of the Summer Research Program,
I was selected as one of 20 students out of an applicant pool of over 1000
for fully funded travel, housing, and living expenses.
I really enjoyed experiencing a new work culture and way of life.
I spent 8 weeks at the EPFL Biorobotics and UNFoLD (Unsteady Flow Diagnostics) Laboratories in Lausanne, Switzerland
studying undulatory swimming using a bio-mimetic eel-like robot.
My work centered around carrying out experiments to find the optimal parameters for
speed, power, and cost of transport.
I designed and fabricated attachments to the robot to increase the stability and
reduce rolling motion and offset trajectory of the robot.
I analyzed video footage using the DeepLabCut framework
and Python to track the robot to
extract the trajectory and velocity.
As a part of my work in UNFoLD,
I designed an optical tracking system to track a moving device in an
experimental water tank to allow for more extensive experiments.
As a part of the Summer Research Program,
I was selected as one of 20 students out of an applicant pool of over 1000
for fully funded travel, housing, and living expenses.
I really enjoyed experiencing a new work culture and way of life.
Soft Robotic Device to Recreate the Pathophysiology of Hydrocephalus in an Animal Model at the MIT Roche Lab
Hydrocephalus is a chronic condition that affects about 1 million Americans and is caused by an abnormal accumulation of cerebrospinal fluid (CSF) in the brain. The development of treatments for hydrocephalus is profoundly hindered by the lack of a robust animal model. This project aimed to overcome this through the development of an implantable soft robotic device that is capable of modeling hydrocephalus in an animal model. To begin the project, I performed a literature review on the topic and previous work. Then, I developed and manufactured the implantable soft robotic device with five different materials by plastically deforming silicone rubber tubings on an Instron and sealing off one of the ends. I created and analyzed stress/strain curves using an Instron. I also assisted with the development of an in vitro system to model the brain/ventricle system to test the device, which included 3D printing and laser cutting components, and creating a model ventricle by 3D printing a mold and casting silicone. I performed all of the data analysis for this project and experiments in MATLAB and synthesized them into an oral conference presentation. The results of this research were presented at the European Solid Mechanics Conference (ESMC) in July 2022 in Galway, Ireland.
I gained experience with CAD in Fusion 360, learned more about the mechanical properties of materials, analyzed data in MATLAB, and improved my abilities as a researcher.
Force Sensing Surgical Drill Project at Johns Hopkins University Laboratory for Computational Sensing & Medical Robotics
 The summer after my freshman year, I was selected to participate in the Research
Experiences for Undergraduates (REU) program funded by the National Science Foundation (NSF).
As a part of this 10 week program, I continued development of a force sensing surgical drill
for skull base surgeries. Skull base surgeries are particularly challenging due to delicate anatomy,
and forces applied by drills must be delicate. For this reason, a force sensing surgical drill
would be extremely useful to ensure that forces applied are within a critical range to avoid
any complications.
The force sensing surgical drill worked in conjunction with
a hand-over-hand surgical robot developed by Galen Robotics. I worked with both industry and
clinical partners to improve the drill design and sensor system. I worked with surgeons to gather design
requirements and constraints, and improved the existing device after recieving their feedback.
To test the system, I developed experiments using a second sensor to determine how accurately the
new drill could measure the forces.
I used MATLAB to analyze data from these experiments, ran Fourier analyses to help filter the data,
and created figures to visualize the data.
The summer after my freshman year, I was selected to participate in the Research
Experiences for Undergraduates (REU) program funded by the National Science Foundation (NSF).
As a part of this 10 week program, I continued development of a force sensing surgical drill
for skull base surgeries. Skull base surgeries are particularly challenging due to delicate anatomy,
and forces applied by drills must be delicate. For this reason, a force sensing surgical drill
would be extremely useful to ensure that forces applied are within a critical range to avoid
any complications.
The force sensing surgical drill worked in conjunction with
a hand-over-hand surgical robot developed by Galen Robotics. I worked with both industry and
clinical partners to improve the drill design and sensor system. I worked with surgeons to gather design
requirements and constraints, and improved the existing device after recieving their feedback.
To test the system, I developed experiments using a second sensor to determine how accurately the
new drill could measure the forces.
I used MATLAB to analyze data from these experiments, ran Fourier analyses to help filter the data,
and created figures to visualize the data.
Throughout this experience, I gained experience with CAD in SolidWorks, programming in ROS, and data analysis in MATLAB.
Data Analysis for Older Adult Personal Robot in the MIT Personal Robots Group
My work in this project involved organizing and analyzing data from a year-long study on social robots for older adults. Before I joined the project, my lab group had created rapid robot prototypes, interviewed older adults, and had done other design research methodology to inform future social robot design as a part of a project to understand and create a social robot for older adults. When I joined the project, my role was to analyze data from the robot rapid prototyping sessions. I both qualitatively and quantitatively analyzed the data by parsing transcriptions of audio recordings with the older adults and changes made to the robots during the rapid prototyping sessions. I used both Excel and Python to analyze the data and create figures to demonstrate the results. I presented the results of my work to the Personal Robots Group at the conclusion of my work in the lab.